Our research interests are:
We are interested in the design of bio-inspired locomotion robots. Our research emphasizes hardware design, modeling, and closed-loop feedback control. Our overarching goal is to develop mobile robots capable of operating in environments where existing systems face the risk of complete immobilization.
Research Area I: Design of Small, Dynamic Locomtion Systems
Robotic biomimicry of small, agile animals that dynamically interact with their environment—such as bats morphing wings—introduces a range of design and control challenges. These systems feature complex, multi-joint morphologies with numerous active and passive degrees of freedom, constrained by limited payload, power, and onboard computation. We address these challenges by leveraging the computational capabilities inherent in hardware structures through optimization-based mechanical intelligence design.

Research Area II: Robots With Extensive Locomotion Plasticity
Birds exhibit remarkable locomotion plasticity, seamlessly transitioning across mobility modes. These modes, however, impose conflicting design requirements—flight favors lightweight structures and high agility, while legged motion demands heavy, high-torque actuators. Additionally, aerial dynamics are continuous and fluid, whereas legged locomotion is hybrid and intermittent. Integrating these opposing needs within a single robot is highly challenging; we address this through optimization and generative design to achieve balanced performance.
Research Area III: Design of Morpho-functional Robots
We have explored novel forms of locomotion and loco-manipulation inspired by morpho-functional design principles. These systems are tailored for missions in environments where conventional robots risk complete immobilization. A prime example is the permanently shadowed regions (PSRs) of the Moon, where extreme terrain, loose regolith, and low temperatures create formidable mobility challenges that remain unsolved. Our ultimate goal is to one day deploy these designs on the Moon and Mars.



Lab Sponsors:















Lab Story
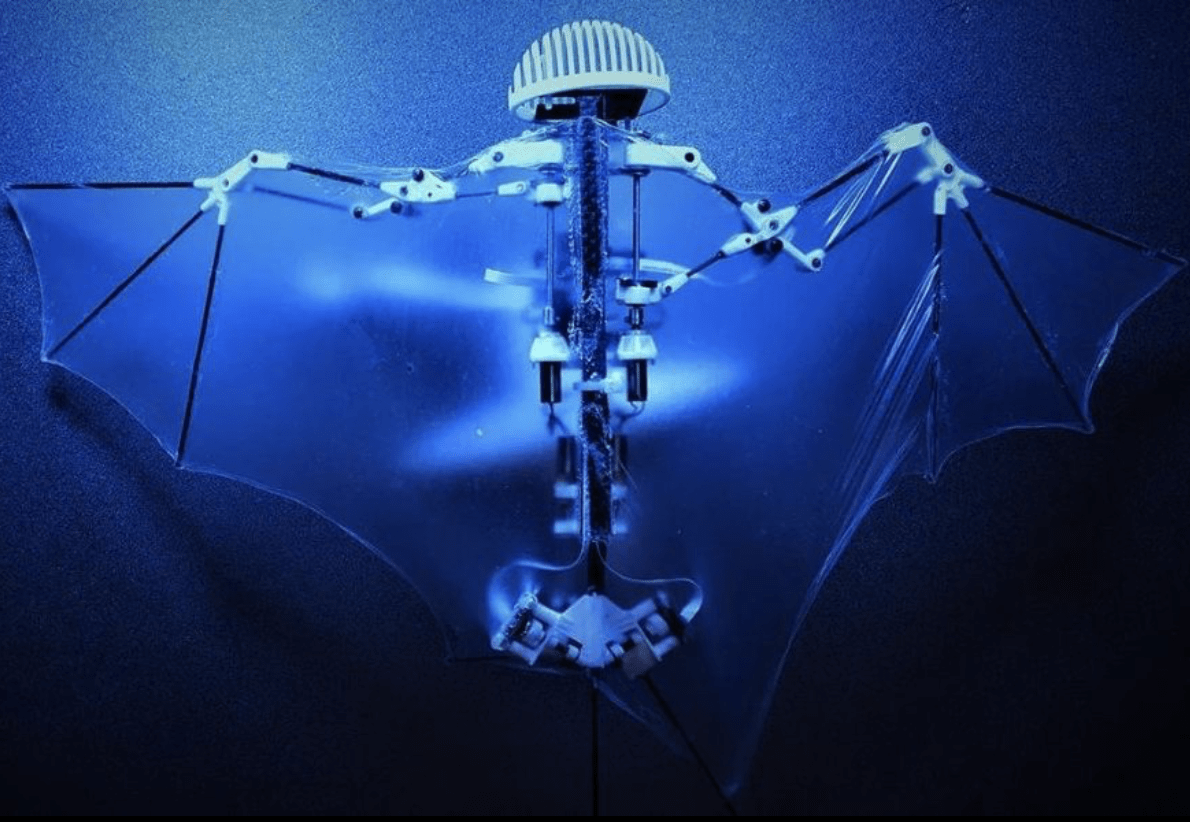
In 2017, Alireza introduced Bat Bot, a bat-inspired robot that captured the complex kinematic modes of natural bat flight. Constructed with a lightweight skeleton and a soft silicone membrane mimicking bat skin, Bat Bot enabled systematic study of aerodynamic and inertial coupling in flapping flight. By modulating dorsoventral wing motions, Ramezani investigated how bats perform rapid and acrobatic maneuvers that conventional aerial robots cannot replicate. The robot provided a new experimental platform for exploring morphing-wing aerodynamics and bio-inspired control strategies. This work was featured as the cover article of Science Robotics in its second issue.

Small, dynamically morphing vertebrates such as bats possess over forty passive and active joints in their flight apparatus, which they can actuate within a tenth of a second. Through rapid posture modulation, they steer fluid–structure interactions during flight or modulate ground contact forces in dynamic walking, as seen in small birds. Robotic biomimicry of such systems presents a significant challenge. The SS Lab leads the design of skeletal structures integrating flexible and rigid joints to realize high-degree-of-freedom mechanisms at small form factors. Beyond bio-inspired locomotion, these structures have immense potential in deployable mechanisms with broad engineering applications.



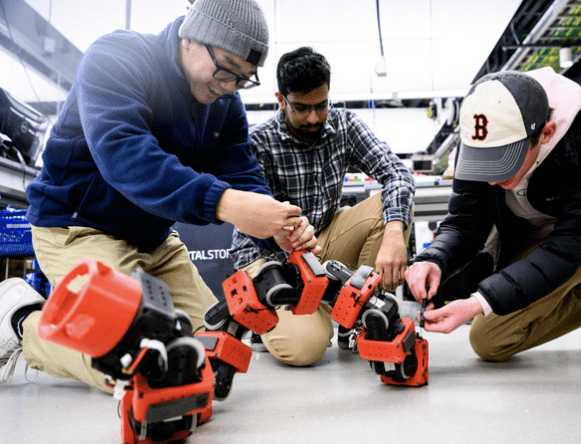
The study of bat flight biomimicry has enabled the SS Lab to uncover new perspectives in robotic locomotion control. Bats dynamically adjust their postural kinematics to modulate wing–fluid interactions. By dexterously manipulating these aerodynamic forces, they generate controlled thrust and moments that allow agile body translation and rotation in three-dimensional space. This process, termed posture manipulation and thrust vectoring, inspired the development of the M4 robot. Introduced in 2023 and featured in Nature Communications and IEEE Spectrum, M4 leverages posture reconfiguration and multifunctional appendages to achieve a mobile inverted pendulum configuration shown below.

Other small vertebrates, such as birds, employ dynamic posture manipulation and thrust vectoring to achieve agile and resilient modes of locomotion. Chukar birds, for instance, utilize wing-assisted dynamic walking to traverse steep slopes by combining leg propulsion with aerodynamic lift. Inspired by this principle of wing-assisted legged locomotion, the Lab in 2023 demonstrated, for the first time, the robotic traversal of slopes as steep as 45 deg—a capability not previously reported. This maneuver is particularly remarkable because, compared to hovering, it enables approximately three times more efficient vertical translation of the center of mass.
These days, SS Lab is buzzing with excitement and activity, channeling years of experience in bio-inspired locomotion research toward a bold new frontier: achieving agile mobility through the unification of dynamic posture manipulation and thrust vectoring under a prestegious program, National Science Foundation CAREER. What began in 2014 with the robotic biomimicry of the Egyptian fruit bat’s dynamically morphing wings, after more than a decade, has evolved into a multidisciplinary exploration of movement—one that bridges biology, mechanics, and control theory. Today, in 2025, this journey stands as a testament to the dedication of countless graduate and undergraduate researchers who have devoted years to pushing the boundaries of robotic locomotion. SS Lab continues to turn nature’s elegance into engineering reality, transforming the way machines move, adapt, and thrive in the world around them.

Science Magazine
Two cover articles of Science (Robotics) Magazine; One Science Article in top 5% of all research outputs scored by Science Magazine Altmetric
Winner of NASA’s Game-Changing Program Award
Two time Finalists In NASA’s Space Technology Mission Directorate’s BIG Idea Competitions
Nature Highlight’s
Research Results On Bat Flight Featured In Nature
Winner of NASA’s ARTEMIS Award
Scored Highest Across Evaluation Criteria Among The Finalist Teams In NASA BIG Idea Challenge 2022 To Take Top Honor
Lab Vision
The Silicon Synapse Lab aims to bridge artificial and biological intelligence in locomotion. Silicon represents the computational core—embedded processors that enable robots to move, perceive, and think in complex environments. Synapse symbolizes the sensory-motor connections in nature. In essence, synapses are the communication links of the nervous system, enabling perception, movement, memory, and learning.
Our work lies at the intersection of control and bioinspired robot locomotion design, where theory meets experiment. Our overarching goal is to create tightly integrated systems capable of exceptional locomotion capabilities in environments where conventional platforms—wheeled, legged, or aerial—face the risk of complete immobilization. Imagine flight through HVAC ducts in buildings, ground traversal over steep, rocky Martian terrain, or dynamic walking on vertical surfaces—our robots are designed to operate in these extreme conditions.